Mapas de ruido por modelación vs. Mapas de ruido por mediciones
- Juan Camilo Rodríguez

- 13 nov 2024
- 5 Min. de lectura
Actualizado: 17 ene 2025
Un mapa de ruido es una representación gráfica de los niveles de ruido que existen en una zona concreta sobre un periodo determinado de tiempo, a través de un índice acústico. Estos permiten ver y analizar la exposición al ruido de un territorio.
Actualmente, ante la ausencia de una norma o protocolo de referencia internacional para la elaboración de mapas de ruido, no hay un procedimiento estándar, por lo tanto cada consultor decide la metodología a implementar.
Existen 2 tendencias claras metodológicas para la elaboración de mapas de ruido:

Mapas de ruido por mediciones
Estos mapas son aquellos que usan algún tipo de muestreo espacial con mediciones de ruido y a partir de los datos obtenidos, se hace una extrapolación geoestadística para obtener los niveles de ruido sobre todo el territorio.
Esta metodología es la recomendada por la Resolución 0627 del 2006 en Colombia, por ejemplo, en el artículo 14 textualmente dice:
"Los resultados obtenidos en las mediciones de ruido ambiental, deben ser utilizados para realizar el diagnóstico del ambiente por ruido. Los resultados se llevan a mapas de ruido los cuales permiten visualizar la realidad en lo que concierne a ruido ambiental, identificar zonas críticas y posibles contaminadores por emisión de ruido, entre otros"
Y para el procedimiento para realizar el muestro espacial a través de mediciones de ruido se debe escoger un rejilla o grilla a lo largo de la ciudad como se menciona en el Anexo 3 Capítulo 3.
Esta es la metodología tradicional que se ha venido trabajando en Colombia desde el 2006, año de entrada en vigencia de la Resolución 0627.

Estos mapas de ruido tienen el inconveniente que son poco representativos del comportamiento acústico urbano, por ejemplo, el ruido emitido por una vía de tráfico vehicular en la realidad se comporta como un foco lineal con una emisión homogénea a lo largo de todo su eje, en contraste con los mapas por mediciones, esta emisión se representa como pequeñas manchas que aparecen alrededor de solamente los puntos donde se realizaron mediciones. En su gran mayoría estos mapas tampoco incluyen el efecto de barrera acústica de los edificios (con las respectivas reflexiones en las fachadas), ni la influencia de la topografía en la propagación del sonido.
Adicionalmente, la alta incertitumbre de las mediciones cortas (1 hora y 15 minutos por punto según la Resolución 0627), hace que los datos de entrada pierdan fiabilidad y sean poco representativos de los 4 años que se pretentenden caracterizar en el mapa de ruido. De acuerdo a la ISO 1996, en las mejores condiciones de la medición la incertidumbre es de +- 4 dB, ahora, en condiciones poco controladas, fácilmente la incertidumbre de una medición de ruido puede superar los 7 dB.
En conclusión, no se deben usar datos de mediciones de ruido puntuales para generar extrapolaciones del comportamiento acústico espacial y temporal, estos datos de mediciones solamente son representativos del punto y momento exacto donde se midieron, ni más ni menos, no se deben usar para generar representaciones del territorio aledaño ni de los 4 años de la vigencia del mapa.
Mapas de ruido por modelación o métodos de cálculo
Como se observa en la imagen inicial, donde se compara los mapas de ruido de Cali en dos periodos diferentes, donde uno fue hecho por mediciones y otro por modelación, los mapas de ruidos realizados con esta última metodología sí son representativos del comportamiento acústido de los diferentes focos de ruido urbano.
Además de representar correctamente la emisión acústica de las diferentes infraestructuras del transporte, sean ejes viales de tráfico vehicular, metros, buses y aeropuerto, los métodos de cálculo incorporan el efecto de barrera acústica de las diferentes edificaciones, las primeras reflexiones respectivas que se generan y la topografía del terreno. Usualmente, se modelan situaciones con condiciones meteorológicas favorables de propagación con direccción y velocidades del viento a favor.
Los métodos de cálculo se basan en el uso matemático de todas las variables que intervienen en la propagación del sonido desde una fuente hasta un receptor, incorporan la potencia acústica del foco de ruido, la distancia de propagación, la absorción del suelo, la existencia y composición de barreras acústicas y el efecto de la variación topográfica hasta el receptor.
Para definir la emisión de los principales focos de ruido, asociados principalmente a las infraestructuras de transporte, los datos de entrada para el modelo usualmente son:
Curvas de nivel
Edificios
Ejes viales, ferrecarriles y aeropuertos
Ubicación de industrias
Aforos vehiculares
Tipos de vehículos por categorías
Velocidades
Esta metodología tiene la posibilidad de usar grandes cantidades de datos obtenidos durante largos periodos de tiempo para generar situaciones tipo promedio que permitan calcular situaciones acústicas representativas de los niveles de ruido promedio de una ciudad, representaciones bastante aceptables para mapas de 4 años de vigencia. Además, la data para los mapas de ruido está directamente relacionada con la información asociada a la planeación urbanística de las ciudades y por lo tanto, cumple su función de herramienta de gestión para el desarrollo urbano.

Otra de las ventajas de los mapas de ruido realizados por métodos de cálculo es que permite calcular el aporte individual de los diferentes focos de ruido, es decir, se puede conocer el aporte por separado del ruido del tráfico vehicular, ferrocarriles, aeropuertos, transporte público, esto de acuerdo al nivel de detalle de la información de entrada, con el fin de generar planes de gestión para cada uno de los actores de manera independiente y clara.
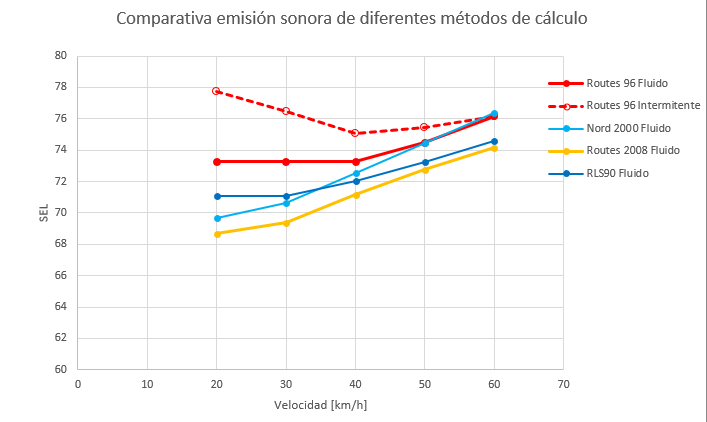
Usualmente los métodos de cálculo son procedimientos estándar elaborados por respectivos países vanguardia para evaluar el ruido urbano de su jurisdicción, se diferencian entre ellos en la emisión que asignan a los diferentes focos de ruido actores, siendo unos con mayor emisión que otros y en la cantidad de información de entrada que requieren.

Finalmente, existe una tercera metodología para la elaboración de mapas de ruido a partir de la mezcla de las 2 anteriores y los diferentes matices que de ahí se desprenden. Predominando actualmente el uso de modelos de cálculo para generar los mapas de ruido y posteriormente calibrarlos o validarlos con datos obtenidos por mediciones. De acuerdo al procedimiento y rigor técnico usado por el consultor, se obtienen los diferentes resultados.
De acuerdo a lo detallado anteriormente, no es correcto modificar los resultados de un mapa de ruido por métodos de cálculo obtenido con data de largos periodos de tiempo, por datos puntuales (representativas de un solo punto en el tiempo y espacio) de mediciones con alta incertidumbre. Tampoco es apropiado manipular sin suficientes criterios técnicos los datos de entrada de un modelo para que se ajusten a las mediciones. Algunos consultores realizan validaciones en lugar de calibraciones.
Mi punto de vista en este caso, es que las mediciones se pueden usar solamente para tener una idea de la realidad y compararse con los resultados de los mapas de ruido para concluir que hay un acercamiento razonable y esperado, análisis válido solamente para el punto donde se hicieron las mediciones. Pasar del análisis a la modificación o manipulación de los modelos para hacerlos concordar con mediciones no tienen ningún sustento técnico.



Comentarios